×
Close
Sign Up
Login
Home
Library S
Library D
Events & Partner
WeMed
MDLA Events Platform
Events
Media Partners
Educational Partner
User Tools
FAQ/USER GUIDE
Language
English
中文/ Chinese
French
Português
Español
Arabic
Russian
Contact Us
×
Close
mdla_1
mdla_2
mdla_3
mdla_4
mdla_5
mdla_6
Categories
Neurosciences
39343
Global Medical University
5111
Allergy
1796
Anatomy & Morphology
1577
Andrology
379
Anesthesia & Intensive Care
1289
Anesthesiology
5405
Audiology & Speech-Language Pathology
347
Behavioral Sciences
100
Biochemical Research Methods
7083
Biochemistry & Molecular Biology
29809
Biodiversity Conservation
345
Biology
8403
Biophysics
8147
Biotechnology & Applied Microbiology
8555
Cardiac & Cardiovascular Systems
30844
Cardiovascular & Respiratory Systems
1364
Cell & Tissue Engineering
696
Cell Biology
11130
Chemistry, Analytical
4273
Chemistry, Applied
10830
Chemistry, Medicinal
8704
Chemistry, Multidisciplinary
18415
Clinical Immunology & Infectious Disease
436
Clinical Medicine
8920
Clinical Neurology
16486
Clinical Psychology & Psychiatry
1289
Critical Care Medicine
3163
Dentistry, Oral Surgery & Medicine
13434
Dermatology
7425
Developmental Biology
6885
Ecology
634
Education, Scientific Disciplines
2055
Emergency Medicine
4042
Endocrinology, Metabolism & Nutrition
24262
Engineering, Biomedical
3729
Entomology
441
Environmental Medicine & Public Health
4676
Evolutionary Biology
274
Gastroenterology & Hepatology
12189
General & Internal Medicine
6927
Genetics & Heredity
14964
Geriatrics & Gerontology
5086
Gerontology
366
Health Care Sciences & Services
16116
Health Policy & Services
644
Hematology
5590
Immunology
24544
Infectious Diseases
13928
Integrative & Complementary Medicine
2920
Medical Ethics
1228
Medical Informatics
2243
Medical Laboratory Technology
419
Medicine, General & Internal
44021
Medicine, Legal
529
Medicine, Research & Experimental
17643
Microbiology
23129
Mycology
0
Nanoscience & Nanotechnology
5452
Neuroimaging
1404
Neurology
4547
Nursing
9720
Nutrition & Dietetics
7842
Obstetrics & Gynecology
8196
Oncology
51859
Ophthalmology
9662
Optics
4250
Orthopedics
11669
Orthopedics, Rehabilitation & Sports Medicine
1791
Otolaryngology
1587
Otorhinolaryngology
4838
Parasitology
1130
Pathology
5078
Pediatrics
21425
Peripheral Vascular Disease
4793
Pharmacology & Pharmacy
35175
Pharmacology/Toxicology
11989
Physiology
8821
Polymer Science
531
Primary Health Care
868
Psychiatry
18881
Psychology
5200
Psychology, Applied
112
Psychology, Biological
388
Psychology, Clinical
804
Psychology, Developmental
257
Psychology, Educational
163
Psychology, Experimental
186
Psychology, Mathematical
0
Psychology, Multidisciplinary
1676
Psychology, Psychoanalysis
30
Psychology, Social
119
Public Health & Health Care Science
2230
Public, Environmental & Occupational Health
26971
Quantum Science & Technology
0
Radiology, Nuclear Medicine & Imaging
12313
Radiology, Nuclear Medicine & Medical Imaging
8049
Rehabilitation
3024
Remote Sensing
0
Reproductive Biology
2860
Reproductive Medicine
1182
Research/Laboratory Medicine & Medical Technology
3958
Respiratory System
7399
Rheumatology
6043
Social Sciences, Biomedical
1188
Substance Abuse
2734
Surgery
33516
Toxicology
4413
Transplantation
948
Tropical Medicine
295
Urology & Nephrology
12876
Veterinary Sciences
35
Virology
2510
Zoology
0
Channels
FRONTIERS IN NEUROROBOTICS
586
BRAIN RESEARCH BULLETIN
0
CELLULAR AND MOLECULAR NEUROBIOLOGY
468
CEREBELLUM
392
CLINICAL NEUROPHYSIOLOGY
0
COGNITIVE COMPUTATION
406
COGNITIVE NEURODYNAMICS
406
CORTEX
594
CURRENT OPINION IN BEHAVIORAL SCIENCES
234
EUROPEAN JOURNAL OF NEUROLOGY
383
EXPERIMENTAL NEUROLOGY
642
FRONTIERS IN AGING NEUROSCIENCE
2697
FRONTIERS IN BEHAVIORAL NEUROSCIENCE
961
FRONTIERS IN CELLULAR NEUROSCIENCE
1401
FRONTIERS IN MOLECULAR NEUROSCIENCE
1392
FRONTIERS IN NEUROENDOCRINOLOGY
160
FRONTIERS IN NEUROLOGY
5381
FRONTIERS IN NEUROSCIENCE
4477
FRONTIERS IN SYSTEMS NEUROSCIENCE
307
GENES BRAIN AND BEHAVIOR
31
HUMAN BRAIN MAPPING
261
JOURNAL OF CEREBRAL BLOOD FLOW AND METABOLISM
101
JOURNAL OF COMPARATIVE NEUROLOGY
102
JOURNAL OF HEADACHE AND PAIN
402
JOURNAL OF NEURAL ENGINEERING
583
JOURNAL OF NEUROCHEMISTRY
206
JOURNAL OF NEUROSCIENCE
1644
JOURNAL OF NEUROSCIENCE RESEARCH
113
JOURNAL OF PAIN
16
JOURNAL OF PARKINSONS DISEASE
6
JOURNAL OF PINEAL RESEARCH
29
JOURNAL OF SLEEP RESEARCH
185
MOLECULAR AUTISM
132
MOLECULAR BRAIN
163
MOLECULAR NEUROBIOLOGY
899
MOLECULAR NEURODEGENERATION
232
MOLECULAR PAIN
35
MOLECULAR PSYCHIATRY
997
NATURE NEUROSCIENCE
633
NATURE REVIEWS NEUROSCIENCE
315
NEUROBIOLOGY OF DISEASE
774
NEUROSCIENCE
0
NEUROSCIENCE AND BIOBEHAVIORAL REVIEWS
0
PAIN
580
PROGRESS IN NEUROBIOLOGY
0
PSYCHOPHARMACOLOGY
1131
ASN NEURO
24
BEHAVIORAL AND BRAIN FUNCTIONS
59
BIOLOGICAL PSYCHIATRY-COGNITIVE NEUROSCIENCE AND NEUROIMAGING
0
BRAIN AND BEHAVIOR
270
BRAIN AND COGNITION
0
BRAIN BEHAVIOR AND EVOLUTION
83
BRAIN RESEARCH
0
EUROPEAN JOURNAL OF NEUROSCIENCE
361
FRONTIERS IN INTEGRATIVE NEUROSCIENCE
269
FRONTIERS IN NEUROINFORMATICS
314
INTERNATIONAL CLINICAL PSYCHOPHARMACOLOGY
49
JOURNAL OF CHILD NEUROLOGY
77
JOURNAL OF NEUROPHYSIOLOGY
519
JOURNAL OF NEUROPSYCHIATRY AND CLINICAL NEUROSCIENCES
190
JOURNAL OF NEUROSCIENCE METHODS
1
JOURNAL OF THE PERIPHERAL NERVOUS SYSTEM
25
MOLECULAR AND CELLULAR NEUROSCIENCE
78
NEUROLOGY INDIA
414
NEUROPSYCHOLOGIA
0
NEUROREPORT
271
NEUROSCIENCE LETTERS
0
SYNAPSE
9
INTERNATIONAL REVIEW OF NEUROBIOLOGY
319
JOURNAL OF COMPARATIVE PHYSIOLOGY A-NEUROETHOLOGY SENSORY NEURAL AND BEHAVIORAL PHYSIOLOGY
227
JOURNAL OF STROKE & CEREBROVASCULAR DISEASES
35
REVUE NEUROLOGIQUE
481
TRENDS IN NEUROSCIENCE AND EDUCATION
90
BRAIN-BROAD RESEARCH IN ARTIFICIAL INTELLIGENCE AND NEUROSCIENCE
126
EGYPTIAN JOURNAL OF NEUROLOGY PSYCHIATRY AND NEUROSURGERY
382
INDIAN JOURNAL OF NEUROTRAUMA
114
INTERNATIONAL JOURNAL OF TRYPTOPHAN RESEARCH
11
NEUROSCIENCE INSIGHTS
18
PAIN REPORTS
200
EXPERIMENTAL BRAIN RESEARCH
572
INVERTEBRATE NEUROSCIENCE
27
JARO-JOURNAL OF THE ASSOCIATION FOR RESEARCH IN OTOLARYNGOLOGY
155
JOURNAL OF COMPUTATIONAL NEUROSCIENCE
115
JOURNAL OF MOLECULAR NEUROSCIENCE
415
JOURNAL OF NEURAL TRANSMISSION
416
NEUROCHEMICAL JOURNAL
194
NEUROINFORMATICS
163
NEUROMOLECULAR MEDICINE
180
NEUROPSYCHOLOGY REVIEW
180
NEUROSCIENCE BULLETIN
472
NEUROTOXICITY RESEARCH
345
PSYCHOPHARMACOLOGY
412
PURINERGIC SIGNALLING
225
SCI Abstract
search
ALL
RECOMMENDED
+
Flexible control and trajectory planning of medical two-arm surgical robot
With the continuous development of medical technology and the progress of robot technology, more and more robots are appli...
Frontiers In Neurorobotics
comment
0
thumb_up
0
Target detection and classification via EfficientDet and CNN over unmanned aerial vehicles
; img_framesOutput: B = (n0, n1, …, nN): class_result.detected_vehicles ← []: Vehicle Detectionsfeature_vectors ← []: Feat...
Frontiers In Neurorobotics
comment
0
thumb_up
0
An efficient grasping shared control architecture for unpredictable and unspecified tasks
1 Introduction Research on robot control has been an active area of investigation for several decades, with applications ...
Frontiers In Neurorobotics
comment
0
thumb_up
0
A novel signal channel attention network for multi-modal emotion recognition
1 Introduction Multi-modal signal recognition is a critical area of research within multi-modal fusion, encompassing fiel...
Frontiers In Neurorobotics
comment
0
thumb_up
0
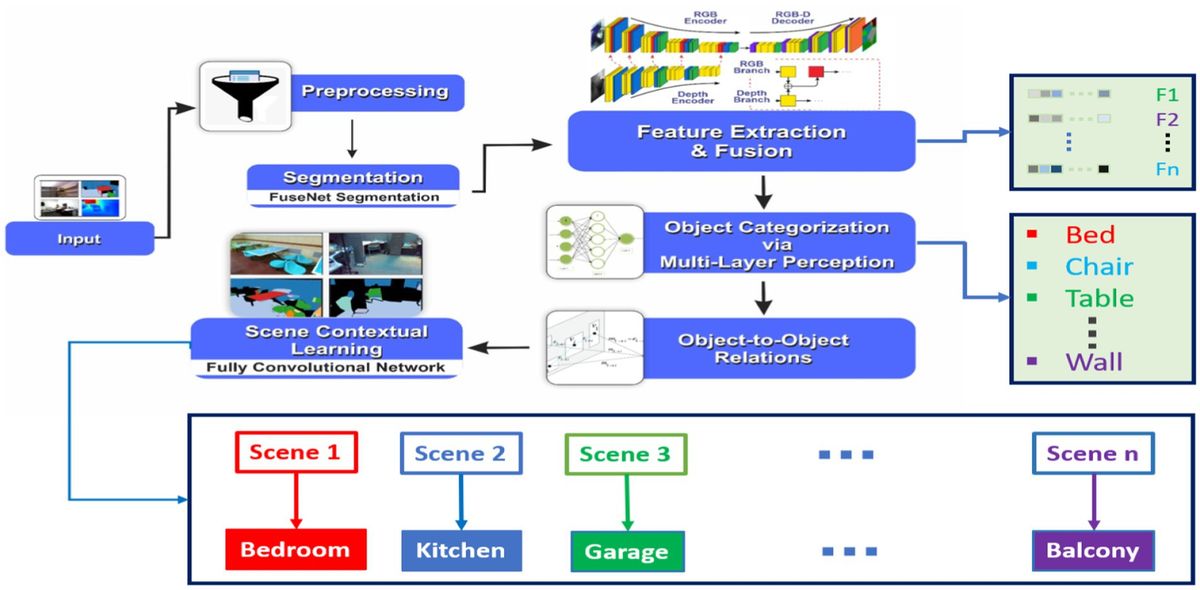
Multi-modal remote perception learning for object sensory data
1 Introduction Intelligent systems acquire information about their surroundings by engaging in contextual scene learning...
Frontiers In Neurorobotics
comment
0
thumb_up
0
MLFGCN: short-term residential load forecasting via graph attention temporal convolution network
1 Introduction With the development of society, human demand for electricity is constantly increasing, among which resid...
Frontiers In Neurorobotics
comment
0
thumb_up
0
Human in the collaborative loop: a strategy for integrating human activity recognition and non-invasive brain-machine interfaces to control collaborative robots
1 Introduction Robots are becoming part of daily human life. From care homes to factories, robots help humans in repetit...
Frontiers In Neurorobotics
comment
0
thumb_up
0
Swimtrans Net: a multimodal robotic system for swimming action recognition driven via Swin-Transformer
1 Introduction Swim motion recognition, as an important research field in motion pattern analysis, holds both academic re...
Frontiers In Neurorobotics
comment
0
thumb_up
0
ACA-Net: adaptive context-aware network for basketball action recognition
1 Introduction In recent years, the integration of neural network models in autonomous systems has revolutionized various...
Frontiers In Neurorobotics
comment
0
thumb_up
0
Fast reconstruction of milling temperature field based on CNN-GRU machine learning models
1 Introduction In the era of Industry 4.0, China’s manufacturing industry is undergoing a profound transformation, and t...
Frontiers In Neurorobotics
comment
0
thumb_up
0
The SocialAI school: a framework leveraging developmental psychology toward artificial socio-cultural agents
1 Introduction Our everyday life is immersed in a sociocultural world, which we navigate using a set of sophisticated soc...
Frontiers In Neurorobotics
comment
0
thumb_up
0
Sports-ACtrans Net: research on multimodal robotic sports action recognition driven via ST-GCN
1 Introduction Robot sports action recognition is a significant research direction in computer vision and machine learnin...
Frontiers In Neurorobotics
comment
0
thumb_up
0
CAM-Vtrans: real-time sports training utilizing multi-modal robot data
1 Introduction In the field of sports technology, the application of deep learning and machine learning techniques to enh...
Frontiers In Neurorobotics
comment
0
thumb_up
0
NAN-DETR: noising multi-anchor makes DETR better for object detection
1 Introduction Object detection remains a cornerstone task in robotic vision, with the primary objective of accurately id...
Frontiers In Neurorobotics
comment
0
thumb_up
0
Noisy Dueling Double Deep Q-Network algorithm for autonomous underwater vehicle path planning
1 Introduction With the rapid advancement of artificial intelligence, the autonomous underwater vehicle (AUV) is utilized...
Frontiers In Neurorobotics
comment
0
thumb_up
0
Design and analysis of exoskeleton devices for rehabilitation of distal radius fracture
is attached in the forearm module, in which the Z0 axis is coincide with the rotation axis of F/E movement. Here, the mot...
Frontiers In Neurorobotics
comment
0
thumb_up
0
Erratum: Swimtrans Net: a multimodal robotic system for swimming action recognition driven via Swin-Transformer
An erratum on: Chen H and Yue X (2024) Swimtrans Net: a multimodal robotic system for swimming action recognition driven v...
Frontiers In Neurorobotics
comment
0
thumb_up
0
Cascade contour-enhanced panoptic segmentation for robotic vision perception
1 Introduction In recent years, camera-based perception systems have been widely used in various kinds of robots, which b...
Frontiers In Neurorobotics
comment
0
thumb_up
0
TL-CStrans Net: a vision robot for table tennis player action recognition driven via CS-Transformer
1 Introduction Table tennis is a highly technical and fast-paced sport, and the recognition of players' movements during ...
Frontiers In Neurorobotics
comment
0
thumb_up
0
A modified A* algorithm combining remote sensing technique to collect representative samples from unmanned surface vehicles
1 Introduction Water pollution has long been a critical global concern (Schwarzenbach et al., 2010). Daily water safety ...
Frontiers In Neurorobotics
comment
0
thumb_up
0
Hybrid knowledge transfer for MARL based on action advising and experience sharing
Multiagent Reinforcement Learning (MARL) has been well adopted due to its exceptional ability to solve multiagent decision...
Frontiers In Neurorobotics
comment
0
thumb_up
0
Counting dense object of multiple types based on feature enhancement
IntroductionAccurately counting the number of dense objects in an image, such as pedestrians or vehicles, is a challenging...
Frontiers In Neurorobotics
comment
0
thumb_up
0
Remote intelligent perception system for multi-object detection
IntroductionDuring the last few years, a heightened interest has been shown in classifying scene images depicting diverse ...
Frontiers In Neurorobotics
comment
0
thumb_up
0
TP-GCL: graph contrastive learning from the tensor perspective
Graph Neural Networks (GNNs) have demonstrated significant potential as powerful tools for handling graph data in various ...
Frontiers In Neurorobotics
comment
0
thumb_up
0
Machine unlearning in brain-inspired neural network paradigms
Machine unlearning, which is crucial for data privacy and regulatory compliance, involves the selective removal of specifi...
Frontiers In Neurorobotics
comment
0
thumb_up
0
An adaptive discretized RNN algorithm for posture collaboration motion control of constrained dual-arm robots
Although there are many studies on repetitive motion control of robots, few schemes and algorithms involve posture collabo...
Frontiers In Neurorobotics
comment
0
thumb_up
0
Real-time precision detection algorithm for jellyfish stings in neural computing, featuring adaptive deep learning enhanced by an advanced YOLOv4 framework
IntroductionSea jellyfish stings pose a threat to human health, and traditional detection methods face challenges in terms...
Frontiers In Neurorobotics
comment
0
thumb_up
0
Editorial: Recent advances in image fusion and quality improvement for cyber-physical systems, volume II
Multi-source visual information fusion and quality improvement can help the robotic system to perceive the real world. I...
Frontiers In Neurorobotics
comment
0
thumb_up
0
On designing a configurable UAV autopilot for unmanned quadrotors
Unmanned Aerial Vehicles (UAVs) and quadrotors are being used in an increasing number of applications. The detection and m...
Frontiers In Neurorobotics
comment
0
thumb_up
0
Optimization of robotic path planning and navigation point configuration based on convolutional neural networks
This study introduces a novel approach for enhancing robotic path planning and navigation by optimizing point configuratio...
Frontiers In Neurorobotics
comment
0
thumb_up
0
Load More
Modal title
×
Modal title
×
Share
Login
Global News and Health Forum
Join Now!
Member Login
Remember me
Forgot password?
Or using
Linkedin