
Remember me

The insulating device was similar to another one patented and used in previous experiments [20], but with different shapes. It was tested and used up to − 42 m of freshwater (mfw).
The concept required the creation of a waterproof box resistant to varying environmental pressures and temperatures and protecting the ultrasound apparatus from accidental impacts with objects underwater. To properly visualize images, one side of the box had to be transparent, keeping sufficient resistance to the hazards mentioned above. Furthermore, the need to access the keyboard—to adjust the ultrasound settings, start video recordings, and create new folders for each patient—required a sufficiently resistant but handy device in the frontal panel. For a schematic representation of the whole device, please see Fig. 1a.
Fig. 1
The insulating device used to allow underwater chest ultrasound. a Schematic representation of the setup. b The opened case (black), with the ultrasound apparatus inside (still charging; green) and the ultrasound probe connected (red); the orange arrow indicates the frontal panel and the glove used to operate the ultrasound. c First test of the empty case; the blue arrow indicates the air tank. d Sides of the insulating device with the wheels used to move it, the inlet circuit (purple arrow), and the outlet valve (yellow arrow). e One of the authors (EG) testing the device underwater; on the right side, the ultrasound probe (red line) sticks out of the metallic case through a dedicated sealed aperture (black line)
In detail, the setup was composed of a metallic external case (width × height × depth 60 × 75 × 30 cm, wall thickness of 6 mm, weight 35 daN) made of Anticorodal 6060 (Fig. 1b: black rectangle), with two rubber wheels at the bottom to facilitate movements and without a frontal panel. The frontal borders of the metallic case contained a rubber gasket to improve insulation. The weight of this setup was 35 daN and had a buoyancy of 40 daN. The case contained a removable, portable ultrasound apparatus (Versana Active, GE Healthcare, United States; Fig. 1b: green rectangle) equipped with a sector probe (1–4 MHz) of the same manufacturer (Fig. 1b, e: red line), which passed through a sealed aperture in the case, thus allowing real-time scans of the subjects. To ensure proper machine–user interaction, a transparent panel made of polycarbonate (width × height 60 × 75 cm, wall thickness of 3 cm; Fig. 1b: orange arrow) was mounted on the front side of the metallic case. In addition, a right-handed rubber glove (thickness: 2 mm) was applied on a circular opening in the frontal panel to allow interaction with the keyboard. Every time the ultrasound apparatus was marinized—after fully charging the battery and connecting the probe—the panel was applied to the case and sealed by fastening 10 threaded devices.
An important concept to bear in mind is that environmental pressure underwater has a constant increase of about 1 absolute atmosphere (ATA) every 10 m of water, plus 1 ATA already existent at the surface and due to the atmosphere weight (assuming experiments at sea level) [7]. From that, the need to ensure internal equalization with environmental pressure to avoid water infiltrations and disconnections or tearing of the rubber glove. The case was therefore connected to a standard diving cylinder with 200 atm of compressed air using a circuit similar to that used in SCUBA diving. Specifically, a first stage was attached to the scuba tank valve and reduced tank air pressure to intermediate values, routing it to a regulator hose (Fig. 1c: blue arrow). A second stage valve (commonly known in diving as “mouthpiece”) connected the regulator hose and the case inlet (Fig. 1d: purple arrow). It kept the inner pressure stable by forcing air inside the watertight case during the descent at the same pressure as the surrounding water environment.
Conversely, during ascent, the inner pressure becomes higher than the external, with the same reduction of 1 ATA every 10 m of water. To avoid the explosion of the rubber glove during ascent, a commercially available gas outlet valve (of the type used in drysuits to avoid overpressurization) was placed directly on the case and allowed a controlled air leak, ensuring a safe pressure equalization until resurfacing (Fig. 1d: yellow arrow).
The experimentsThe experiments occurred at the world’s deepest pool, “Y-40 THE DEEP JOY”, with a water temperature of 31.5 ± 0.5 °C in Montegrotto Terme (Padova, Italy).
Preliminary pilot testing sessions were carried out in April–May 2021, submerging the whole apparatus without the ultrasound device to evaluate the water-tightness and prevent potential other issues. After some water drops were detected inside the frontal panel, the insulation was improved by greasing the gasket before the frontal panel application. However, a “near miss” accident happened when the apparatus was manually lowered, and the equalization failed: the glove dangerously inflated but did not break. The cause was attributed to the too-fast lowering of the device. To avoid similar events, the insulating device was slowly lowered into the water using a winch, with a SCUBA diver constantly monitoring for proper equalization and ready to stop the maneuver (Fig. 1e).
The ultrasound apparatus was inserted into the case in the second feasibility step. The risk of overheating and malfunctioning of the ultrasound apparatus resulted from the environmental temperature (warm thermal water), the increase of inner pressure while descending (known to increase temperature), and the ultrasound apparatus itself. No issues were reported during the activities, and the ultrasound properly worked during all the sessions.
Experiments were carried out at − 15 mfw and − 42 mfw; therefore, operational pressures (internal and external) of 2.5 and 5.2 ATA were estimated during the projecting phase and guided the choice of materials and their dimensions and thickness. The marinized ultrasound apparatus was submersed at each depth before every experimental session using a winch and accompanied by a SCUBA diver to monitor for any leakages or technical failures. Once at depth, each lung scan lasted between 40 and 50 s (Fig. 2). Total operation time was about one hour, including the descent, bottom time, and resurfacing. At the end of each experimental session, the apparatus was winched out of the water, with a SCUBA diver again monitoring the proper functioning of the gas outlet valve and pressure equalization.
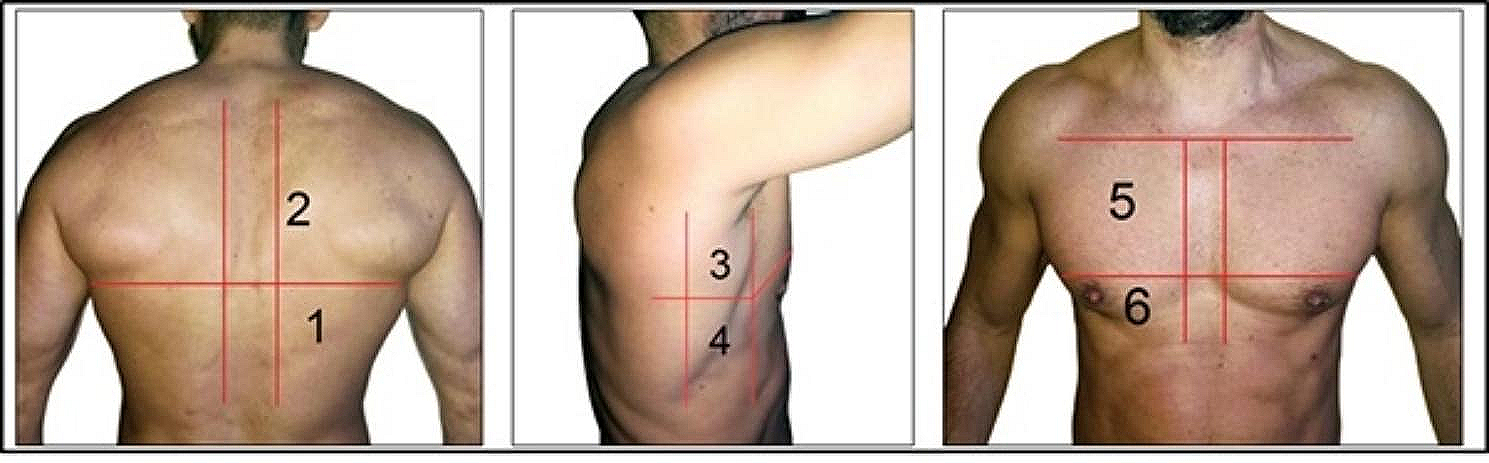
Fig. 2
Chest ultrasound performed by the authors at − 42 m underwater
Comments (0)